
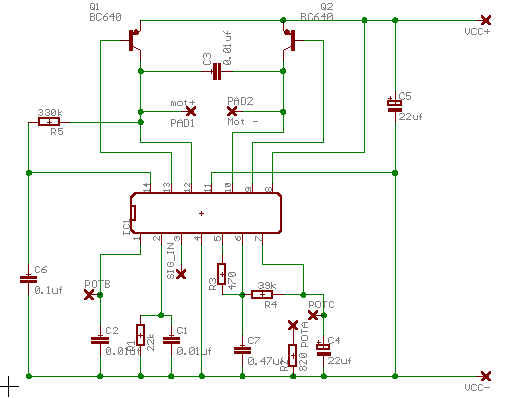
servo timer

The Servo Timer II is an innovative electronic timing solution specifically designed for applications requiring precise control of servo motors, particularly in the context of water rockets. The core functionality revolves around the timer's ability to manage the deployment of a parachute through a single RC servo motor, which releases a latch mechanism. The timer is equipped with a configurable delay feature that allows users to set a specific time interval before the servo motor is activated, ensuring that parachute deployment occurs at the optimal moment.
The system supports multiple triggering mechanisms, enhancing its versatility beyond parachute deployment. It can be employed in staging rockets, where precise timing is crucial for the successful separation of rocket stages, as well as in controlling camera angles for aerial photography. The inclusion of a built-in G-switch allows for automatic launch detection by sensing accelerative forces greater than 2G, providing a reliable method for initiating the timer as the rocket takes off.
The device features a break wire mechanism for triggering, which can be configured to respond to either the breaking of a wire loop or the closing of a circuit. This adaptability allows integration with various mechanical switches and external G-switches, extending the timer's application range. Furthermore, the system can accommodate external pressure switches to detect burnout, ensuring accurate stage separation regardless of the rocket's internal pressure conditions.
For enhanced connectivity, the Servo Timer II includes an external input signal feature, which utilizes an opto-coupler to isolate the timer from other circuits. This design element allows for seamless integration with flight computers or altimeters, enabling direct triggering from different power supplies without additional circuitry complications.
The timer's operational sequence is straightforward: upon activation, the servo motor moves to a predetermined start position. Once the timer countdown concludes, the servo transitions to the end position, executing the desired function, such as opening the parachute latch. This mechanism is designed to work with a wide variety of RC servo motors, ensuring compatibility with numerous setups and applications.
Overall, the Servo Timer II represents a significant advancement in timing technology for rocketry and related fields, combining flexibility, reliability, and ease of use in a compact design.The Servo Timer II was primarily designed for parachute deployment on water rockets, but can be used for other applications. The timer controls a single RC servo motor that can open a latch on a parachute door. Once triggered the timer waits a set amount of time before moving the servo motor. The timer has a number of configurable parameters along with several trigger options. It may also be used in other applications such as staging rockets, controlling camera direction etc. A big thank you goes to PK from Whooshtronics for his great support on this project. Also thank you to everyone who helped with ideas and suggestions on Australian Rocketry`s forum. The Servo Timer II development has been covered on these forum threads: and and also on the Yahoo water rocket forum here: Also a thank you goes to the water rocket community who have supported us over the years and given us feedback on the previous versions of this timer. We have taken your suggestions and incorporated them into this design. Updated: 26th May 2013 - Sorry but there are no more Servo Timer IIs left for sale, as they have all sold out.
Thank you to everyone who has purchased the timer. We will continue to provide support for the timers. If you have any questions or comments please contact us. If you would like to build your own, the STII PCB layout (in Eagle. brd format) and. HEX files are now available for FREE on request. All the SMD components can be substituted with through-hole components to make it easier to build on a prototyping board. (Sorry we don`t have a through-hole PCB layout) Built in G-switch: The built in G-switch will detect a launch when the timer experiences acceleration of over 2G.
Depending on the application, such as when triggering occurs at burnout or apogee, or where the board cannot be oriented vertically, the built in G-switch trigger option can be disabled. Break wire: A pair of contacts is available on the input connector to connect a loop of wire. Depending on the configuration, either a break in the loop will trigger the timer, or connecting the loop will trigger it.
This allows the timer to be triggered by simple mechanical contacts or switches whose contacts are normally open or closed. External higher acceleration G-switches can also be directly connected to this input. Pressure switches used for detecting burnout may also be connected. External 3-12V input signal: This input is routed through an opto-coupler isolating the timer from the triggering circuitry.
This allows other circuits and flight computers operating on different power supplies to trigger the timer directly without additional circuitry. This input can usually be connected directly to a pyro output of a flight computer or altimeter. Launch detect This is typically achieved using a G or acceleration switch. Triggering occurs as soon as the rocket leaves the launch pad. Another variation to this is a set of contacts that are closed and an insulator is removed from between them during launch.
The insulator is usually attached to the launcher. Burnout detect - This technique can use a pressure switch to detect when the pressure inside the rocket has reached atmospheric pressure, or some preset value. This is useful for staging rockets. This allows the rocket to deploy the second stage at the correct time regardless of how much pressure or water was used in the booster.
Negative G detect This is another technique used to detect when the rocket has stopped producing thrust and the rocket starts to slow down. An inverted mercury switch can be used here where the mercury floats upwards to make contact as drag continues to slow the rocket down after burnout.
Negative Gs happen shortly after burnout. In normal operation when the timer is first turned ON the servo motor moves to the start position. When the timer expires, the servo motor moves to the end position. Due to the large variety of RC servo motors av 🔗 External reference
Related Circuits
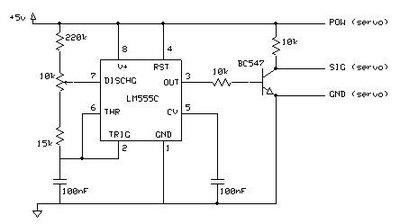
This circuit enables the testing of a servo motor. The angle of the servo can be adjusted using a 10k potentiometer. It is possible that not all positions can be achieved with this circuit; experimenting with different resistors may...
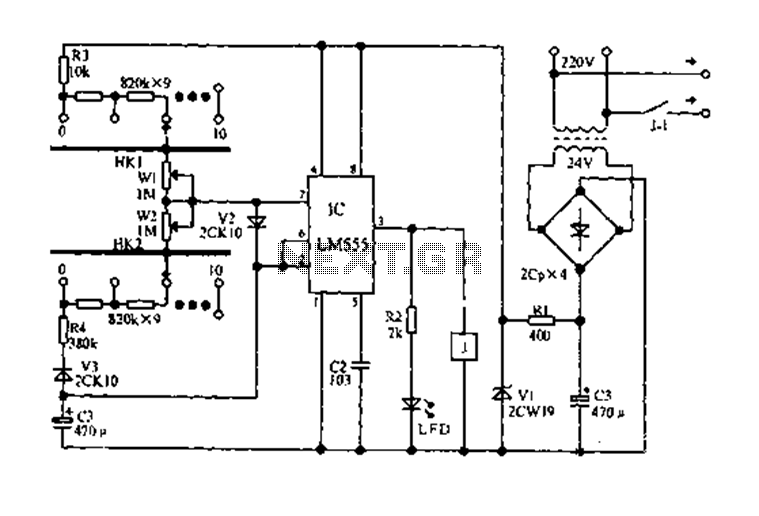
The circuit diagram for an electric start and stop timer is illustrated in the following cycle. It utilizes the LM555 integrated circuit configured as an adjustable duty cycle multivibrator. The circuit includes components C3, KH1, W1, KH2, and W2,...
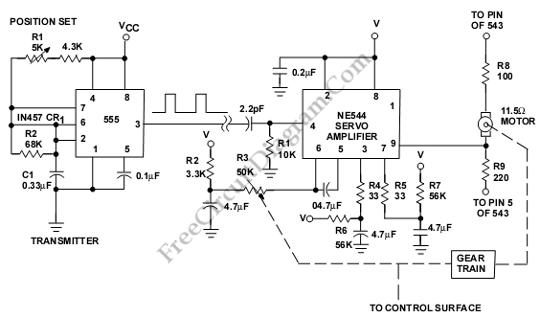
This is a servo system controller circuit designed for remote control of a servo motor. The circuit utilizes a 555 timer and requires only six additional components. The servo system controller circuit operates by generating a pulse-width modulation (PWM) signal,...
Twelve LEDs can be arranged in a circle to represent the twelve hours of a clock face, while an additional twelve LEDs can be arranged in an outer circle to indicate five-minute intervals within the hour. Four additional LEDs...
To connect the three potentiometer (Pot) terminals, it is essential to identify the tags and their respective positions. When examining the back of the potentiometer, ensure the tags are oriented at the top. Incorrect connections will result in the...
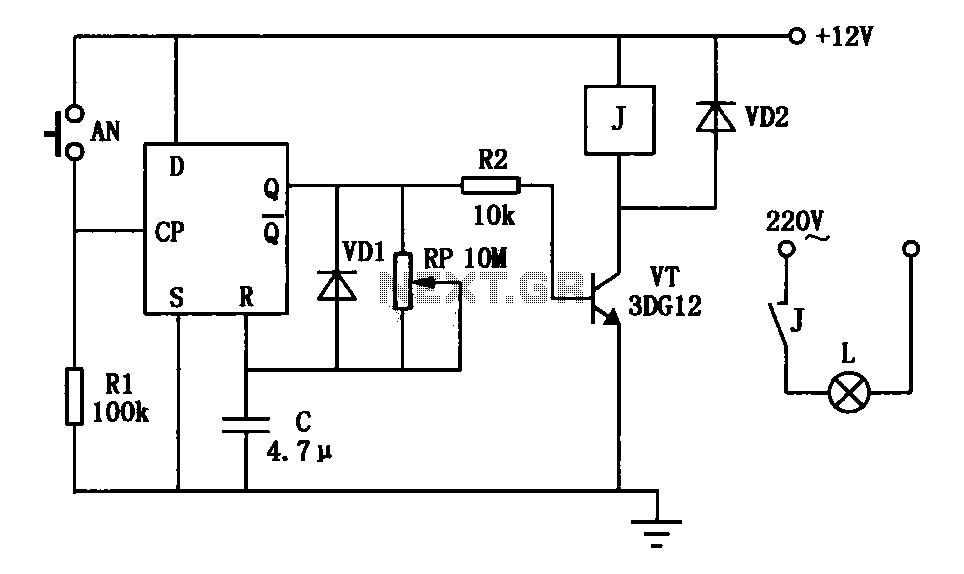
An exposure timer circuit is illustrated using D flip-flops, allowing for timing adjustments between 1 to 30 seconds. The D flip-flop circuit is connected to a one-shot timer. When exposure is required, pressing button AN generates a pulse that...