
typical circuit diagram of star delta
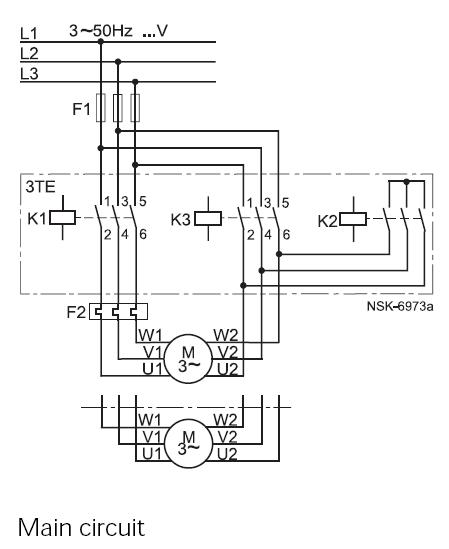
The start-delta starting method is a widely used technique in industrial applications to mitigate the effects of high inrush current and torque during motor startup. This method employs a combination of contactors and a timer to manage the transition from a star (or wye) configuration to a delta configuration. In the star configuration, the motor windings are connected in such a way that the voltage across each winding is reduced, leading to a lower starting current and torque. This is particularly advantageous for applications with significant inrush currents, as it helps to protect the motor and associated equipment from damage.
The three contactors serve distinct purposes: one for the star connection, one for the delta connection, and one for the overload relay to monitor the motor's current and protect against overheating. The overload relay is critical in ensuring that the motor does not operate under excessive load conditions, which could lead to failure. The timer is programmed to maintain the star connection for a predetermined duration, allowing the motor to accelerate to a certain speed before switching to the delta configuration.
In applications such as pumps and fans, where the load torque is relatively low at startup, the start-delta method is particularly effective. The load torque increases with the square of the speed, which means that as the motor accelerates, it can handle the increasing load without exceeding its rated capacity. However, if the application involves higher load torques, exceeding 50% of the motor's rated torque, this starting method may not be suitable. In such cases, the motor may not achieve the necessary speed before transitioning to the delta configuration, resulting in insufficient torque to overcome the load.
It is essential to consider the specific requirements of the application when selecting a starting method. The start-delta starter is best suited for applications with light to moderate loads, while direct-on-line starters or soft starters may be more appropriate for heavier loads. Proper selection and implementation of the starting method can lead to improved efficiency, reduced wear on the motor, and extended operational life of the equipment.This is a starting method that reduces the starting current and starting torque. The device normally consists of three contactors, an overload relay and a timer for setting the time in the star-position (starting position). The motor must be delta connected during a normal run, in order to be able to use this starting method.
The received starting current is about 30 % of the starting current during direct on line start and the starting torque is reduced to about 25 % of the torque available at a D. O. L start. This starting method only works when the application is light loaded during the start. If the motor is too heavily loaded, there will not be enough torque to accelerate the motor up to speed before switching over to the delta position.
When starting up pumps and fans for example, the load torque is low at the beginning of the start and increases with the square of the speed. When reaching approx. 80-85 % of the motor rated speed the load torque is equal to the motor torque and the acceleration ceases.
To reach the rated speed, a switch over to delta position is necessary, and this will very often result in high transmission and current peaks. In some cases the current peak can reach a value that is even bigger than for a D. O. L start. Applications with a load torque higher than 50 % of the motor rated torque will not be able to start using the start-delta starter.
🔗 External reference
Related Circuits
This is a simple yet effective darkness activator. It uses a light-dependent resistor (LDR) to detect light, and when no light is present, it activates an alarm from an 8-ohm speaker. The circuit can be easily modified to function...
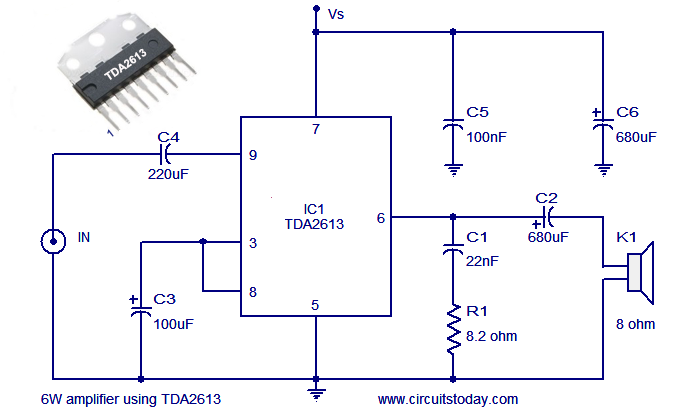
A simple and easy-to-build Hi-Fi audio power amplifier circuit is presented here. This 6-watt Hi-Fi audio amplifier circuit utilizes the TDA2613 integrated circuit (IC). The circuit design employs the TDA2613, which is a high-performance audio amplifier IC known for its efficiency...
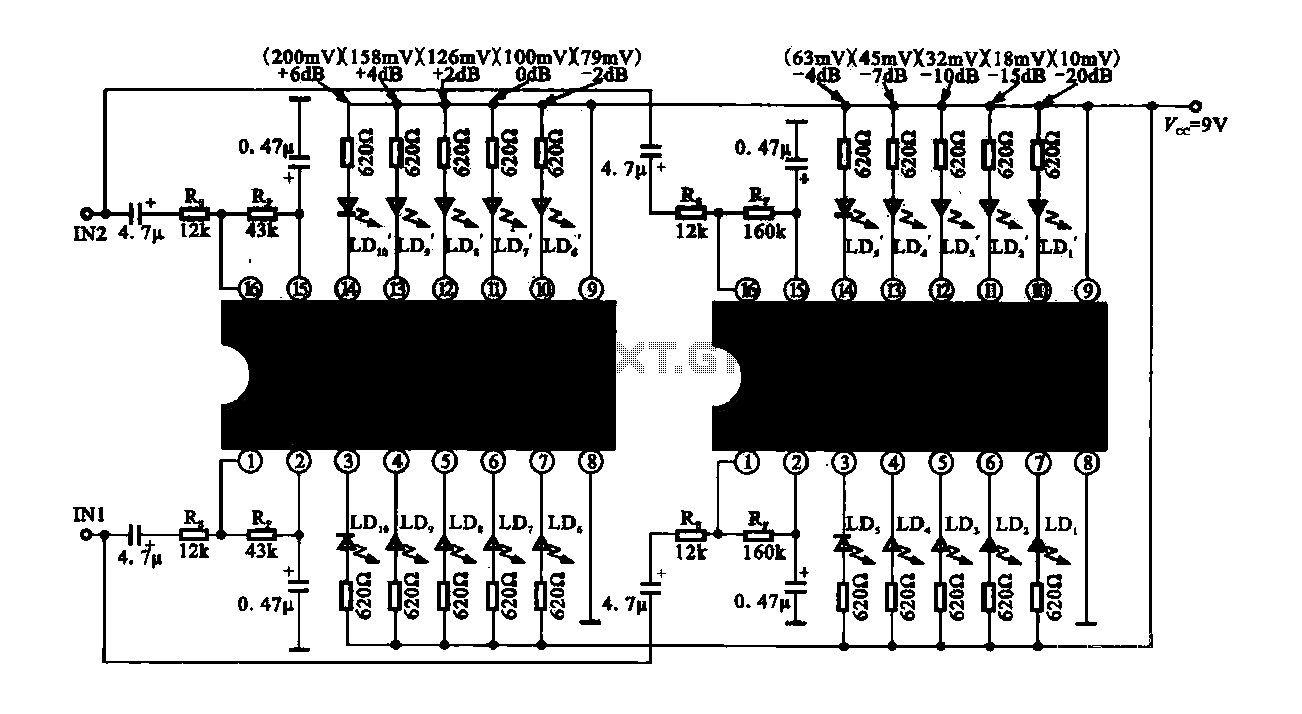
The circuit consists of dual drive integrated circuits (ICs) utilized in a 10 LED level meter configuration. The schematic features two TLM8101 driver ICs, which can be employed as alternatives. The 10 LED level meter circuit is designed to provide...

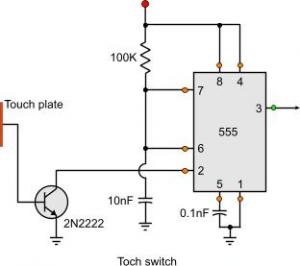
Dew (condensed moisture) adversely affects the normal performance of sensitive electronic devices. A low-cost circuit described here can be used to switch off any gadget automatically in case of excessive humidity. At the heart of the circuit is an...
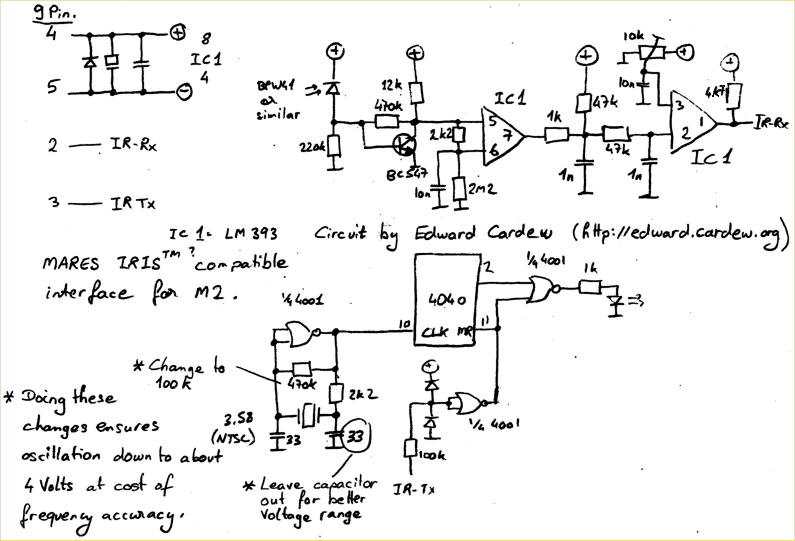
A TSOP4156 is often difficult to obtain or expensive to purchase. In response, an individual utilized old BPW41 infrared diodes to construct a custom receiver. The power source is derived from the RS232 port, requiring a minimum of 5.5...
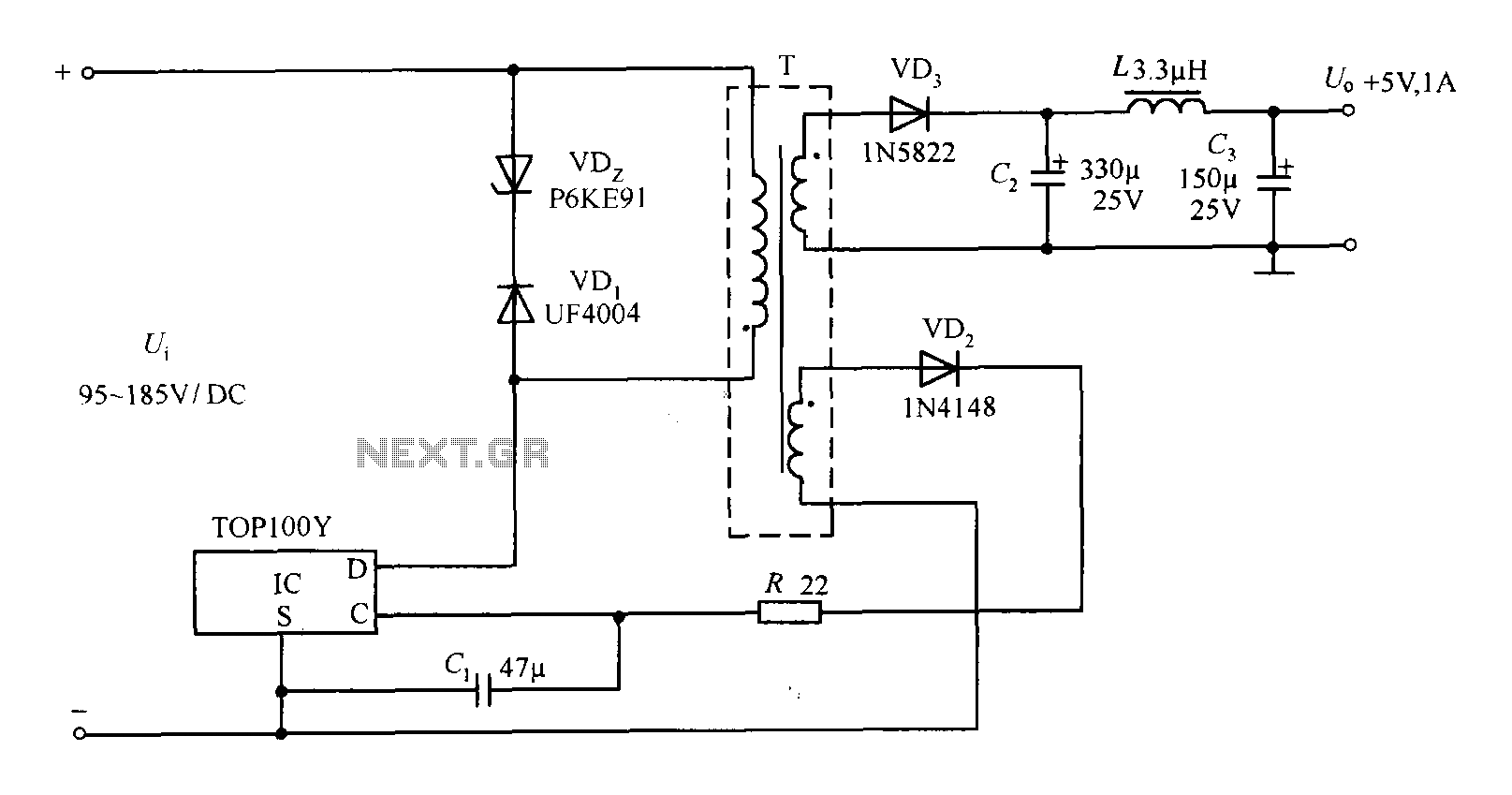
The TOP100Y is a flyback DC switching power supply circuit with a +5V, 1A output. This power supply features a feedback circuit that directly regulates the output voltage, making it suitable for applications that require electrical isolation and minimal...
Warning: include(partials/cookie-banner.php): Failed to open stream: Permission denied in /var/www/html/nextgr/view-circuit.php on line 713
Warning: include(): Failed opening 'partials/cookie-banner.php' for inclusion (include_path='.:/usr/share/php') in /var/www/html/nextgr/view-circuit.php on line 713