
Unmanned Ground Vehicle (UGV) or Spycar
 or Spycar")
The Unmanned Ground Vehicle (UGV) project is an innovative design that integrates advanced remote control technology with versatile mobility features. The UGV is structured as a four-wheeled vehicle, which is capable of executing six distinct movements, enhancing its maneuverability and operational range.
The core of the UGV's functionality relies on its radio control system, which allows operators to command the vehicle from a significant distance. This system typically employs RF (radio frequency) communication, ensuring reliable connectivity even in environments where obstacles may obstruct direct line-of-sight. The design may include a transmitter and receiver setup, where the transmitter is operated by the user and the receiver is installed on the UGV.
Additionally, the UGV can be equipped with a wireless camera, which serves as an essential component for surveillance and reconnaissance missions. The camera captures real-time video footage, which is transmitted back to a PC or other display devices. This feedback loop enables the operator to navigate the vehicle effectively, providing situational awareness and enhancing the overall control experience.
The vehicle's six different motions can be achieved through a combination of servo motors and wheel configurations. The use of a differential drive system allows for precise control of the vehicle's direction and speed, making it adept at navigating various terrains. The integration of sensors, such as ultrasonic distance sensors or infrared sensors, may further enhance the UGV's capabilities by enabling obstacle detection and avoidance.
Power management is another critical aspect of the UGV design. The vehicle typically operates on rechargeable batteries, which must be carefully selected to provide adequate power for both the propulsion system and the wireless camera. Battery life can be extended through efficient power distribution and management circuits, ensuring prolonged operational time during missions.
In conclusion, the Unmanned Ground Vehicle project represents a sophisticated blend of radio control technology, mobility, and real-time video surveillance capabilities. Its design allows for versatile applications in remote monitoring, reconnaissance, and other fields where unmanned operation is advantageous.Unmanned Ground Vehicle (UGV) or Spycar project is a radio controlled 4 wheeler, which have 6 different motions. In this 4 wheeler platform we can mount wireless camera and using the video feedback on a PC, we can drive the vehicle from a distant place
🔗 External reference
Related Circuits
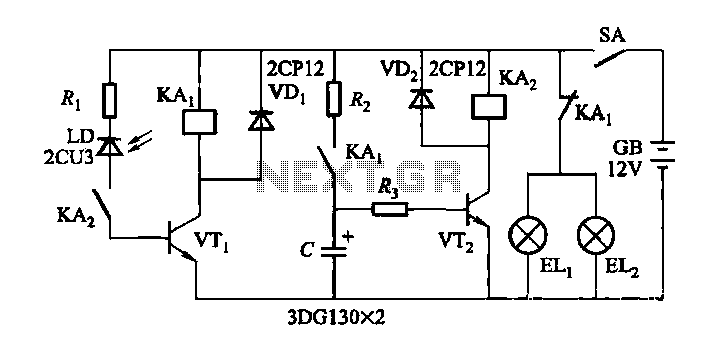
When driving at night and approaching another vehicle, traffic regulations dictate that the distance between the two vehicles should be maintained. This is achieved by alternately activating and deactivating the high beams, while utilizing either the wide lights or...

A resistive voltage divider is utilized to establish a bias voltage for the input (pins 2 and 3). The demodulated FM signal is introduced to the input through a two-stage high-pass filter, which serves to provide capacitive coupling and...
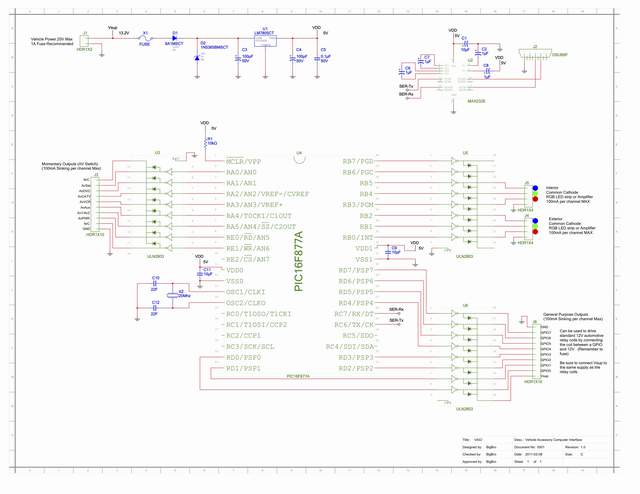
This document provides information for developing a Vehicle Accessory Computer Interface (VACI). The project involves a straightforward design that required approximately three weeks of planning, programming, and debugging. The interface has garnered significant interest, with many users expressing a...

Create a circuit that enables the activation of a relay to control an LED. The relay operates at 12 V, while the available input voltage is 5 V. An NPN transistor will be utilized to switch the power to...
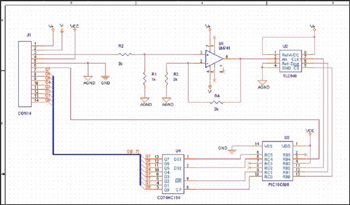
This example demonstrates the design of a circuit that incorporates both analog and digital components, features multiple power planes, and utilizes a single ground plane that is divided into analog and digital sections while maintaining a common reference point. The...
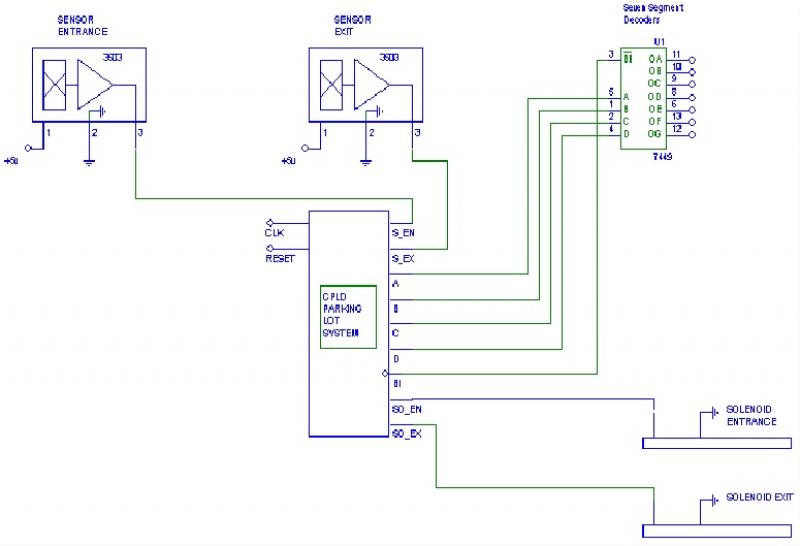
The objective of this project was to create a parking lot management system. The project was divided into five design phases. Throughout the development process, various challenges were encountered, and progress was made compared to the reports from the...