
stepper motor interfacing with spartan 3an fpga
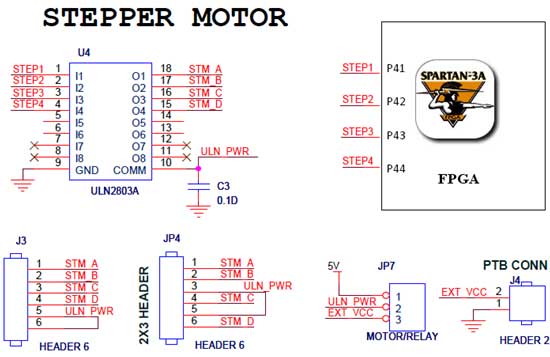
The Spartan-3an board is designed to facilitate the control of stepper motors through a robust interfacing mechanism. The ULN2803A is a crucial component in this setup, providing the necessary current amplification to drive the motor effectively. This Darlington transistor array consists of eight high-voltage, high-current transistors, which are configured to operate as a low-side switch. The use of Darlington pairs allows for higher current gain, making it suitable for driving inductive loads such as stepper motors.
In the schematic, the stepper motor's control lines are connected to the output pins of the ULN2803A. Each output pin corresponds to a specific phase of the stepper motor, allowing for precise control of the motor's rotation direction and step increments. The inputs of the ULN2803A are connected to the I/O ports of the Spartan-3an board, which are configured to send control signals based on the desired motor operation.
The PTB connector on the board is an important feature, as it allows for the connection of an external power supply. This is particularly useful when the stepper motor requires more current than the board can provide through its I/O ports. By connecting an external power source to the PTB connector, the ULN2803A can draw the necessary power to drive the motor without overloading the board's power supply.
In summary, the Spartan-3an board's design for stepper motor interfacing exemplifies the integration of digital control with high-current drive capabilities, enabling efficient and effective motor control in various applications.The Spartan-3an board has external stepper motor interfacing, indicated as in Figure. Stepper Motor is driven by ULN2803A. It is a high-voltage, high-current Darlington transistor array. ULN2803 is used as a driver for port I/O lines, drivers output connected to stepper motor, PTB connector provided for external power supply if needed. 🔗 External reference
Related Circuits
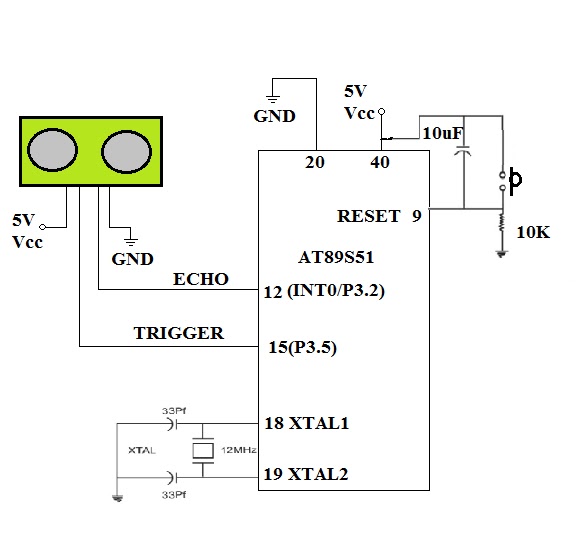
To enable a robot to detect objects in its surroundings, an ultrasonic sensor is recommended. While infrared (IR) sensors are inexpensive, their operational range can fluctuate due to ambient light changes, resulting in inaccurate range measurements. Ultrasonic sensors operate...
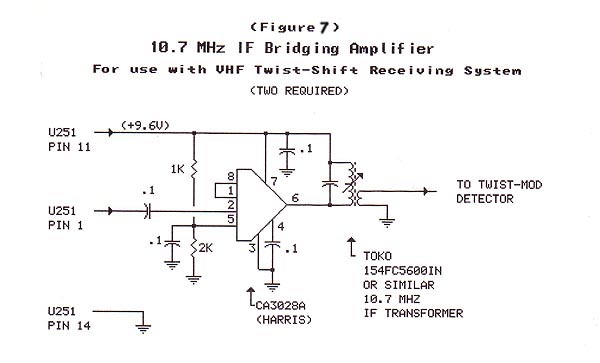
The material in this section demonstrates the construction of the Twist-Shift system for VHF utilizing commonly available surplus land mobile VHF transceivers that have been modified to operate on the 2-meter ham band. The radios employed in this project...
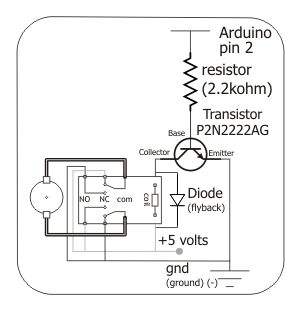
To control the motor, an H-bridge will be utilized in conjunction with a double-pole double-throw (DPDT) relay, as illustrated in the schematic below. For further details, additional resources are available. The proposed circuit employs an H-bridge configuration to facilitate bidirectional...
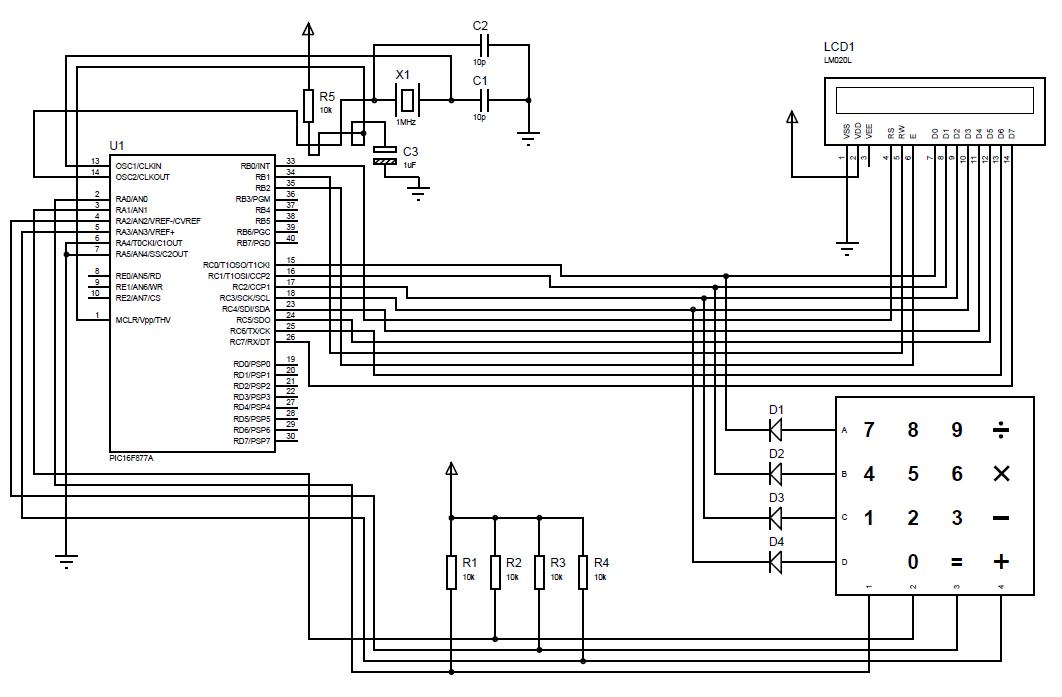
A beginner or hobbyist is seeking to learn more about microcontrollers. The objective is to display an output on an LCD when a button on the keypad is pressed. To achieve the desired functionality of displaying output on an LCD...
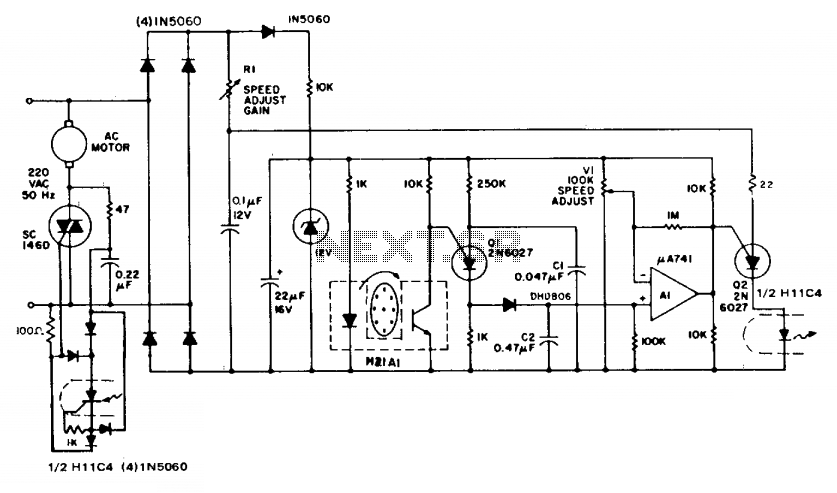
The circuit demonstrates feedback speed regulation for a standard AC induction motor, a task that is typically challenging to achieve without the use of an expensive generator-type precision tachometer. When the apertured disc connected to the motor shaft allows...
This 3A charger was originally designed to work with small batteries like those used in motorcycles. In principle it can be used to charge car batteries also but will take a lot longer. The charger below charges a battery...